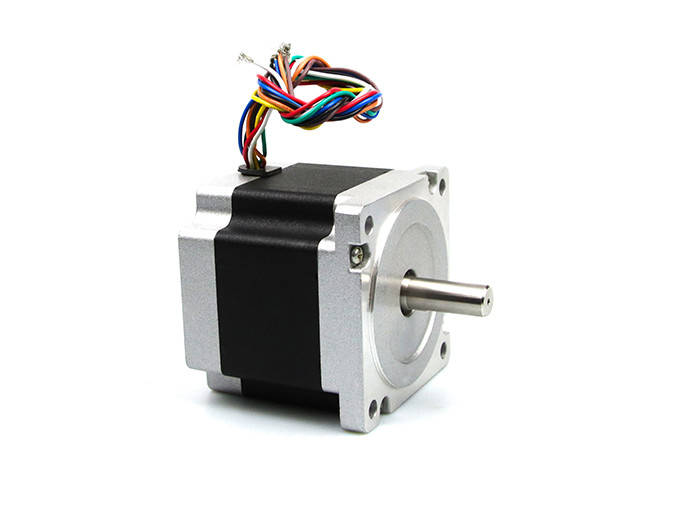
Motor deslizante do Nema 34 de 86BYGH 86mm com o CNC do motorista 4.2A 3N.M 6N.M 8N.M 12N.M Used For que grava a trituração
Um motor deslizante do Nema 34 é um motor deslizante com 86 x 86 milímetros) uma placa dianteira de 3,4 x 3,4 polegadas (. Os motores deslizantes do torque alto do Nema 34 entregam o grande valor sem o sacrifício da qualidade. Estes motores são projetados para fornecer o torque possível o mais alto mas para minimizar a vibração e o ruído audível.
O NEMA (associação nacional dos fabricantes elétricos) 34 é um motor deslizante com um ângulo da placa dianteira e da etapa 1.8° da polegada 3.4×3.4. Cada fase tira 4,0 A, permitindo um torque guardando de 42 quilograma-cm. O motor deslizante do NEMA 34 é usado geralmente nas impressoras, na máquina do CNC, nos atuadores lineares e nos discos rígidos.
A decisão entre os motores do NEMA 23 e do NEMA 34 é primeiramente uma decisão sobre a produtividade -- Os motores do NEMA 34 podem remover o material em uma taxa mais alta usando umas taxas de alimentação mais altas e umas profundidades cortadas mais profundas.
1. especificação híbrida de Genaral do motor deslizante de 86mm:
| Nome |
motor de etapa do nema 34 |
| Modelo |
JK86HS155-4208 |
| Tipo do motor |
motor deslizante bipolar/unipolar |
| Tensão avaliado |
5.25V |
| Guardando o torque |
13N.m |
| Ângulo da etapa |
motor de piso de 1,8 graus ou de 1,9 graus ou de 1,2 graus |
| Atual |
4.2A |
| Eixo |
12.7mm/14mm/15.875mm |
| Tipo do eixo |
eixo redondo/eixo do D-corte/eixo chave |
| Uso |
dispositivos médicos, equipamento de iluminação da fase, robô, máquina do CNC, fonte da música e o outro equipamento automático industrial. |
2. 86BYGH especificação elétrica do motor de etapa do nema 34 (1,8 graus):
| Modelo não. |
Ângulo da etapa |
Comprimento do motor |
Atual
/Phase
|
Resistência
/Phase
|
Indutância
/Phase
|
Guardando o torque |
# das ligações |
Torque do retém |
Inércia do rotor |
Massa |
| (°) |
(L) milímetro |
|
Ω |
mH |
N.m |
Não. |
Kg.cm |
g.cm2 |
Quilograma |
| JK86HS68-5904 |
1,8 |
67 |
5,9 |
0,28 |
1,7 |
3,4 |
4 |
0,8 |
1000 |
1,7 |
| JK86HS68-2808 |
1,8 |
67 |
2,8 |
1,4 |
3,9 |
3,4 |
8 |
0,8 |
1000 |
1,7 |
| JK86HS78-5504 |
1,8 |
78 |
5,5 |
0,46 |
4,0 |
4,6 |
4 |
1,2 |
1400 |
2,3 |
| JK86HS78-4208 |
1,8 |
78 |
4,2 |
0,75 |
3,4 |
4,6 |
8 |
1,2 |
1400 |
2,3 |
| JK86HS97-4504 |
1,8 |
97 |
4,5 |
0,66 |
3,0 |
5,8 |
4 |
1,7 |
2100 |
3,0 |
| JK86HS97-4008 |
1,8 |
97 |
4,0 |
0,98 |
4,1 |
4,7 |
8 |
1,7 |
2100 |
3,0 |
| JK86HS100-6004 |
1,8 |
100 |
6,0 |
0,36 |
2,8 |
7,0 |
4 |
1,9 |
2200 |
3,1 |
| JK86HS115-6004 |
1,8 |
115 |
6,0 |
0,6 |
6,5 |
8,7 |
4 |
2,4 |
2700 |
3,8 |
| JK86HS115-4208 |
1,8 |
115 |
4,2 |
0,9 |
6,0 |
8,7 |
8 |
2,4 |
2700 |
3,8 |
| JK86HS126-6004 |
1,8 |
126 |
6,0 |
0,58 |
6,5 |
6,3 |
4 |
2,9 |
3200 |
4,5 |
| JK86HS155-6004 |
1,8 |
155 |
6,0 |
0,68 |
9,0 |
13,0 |
4 |
3,6 |
4000 |
5,4 |
| JK86HS155-4208 |
1,8 |
155 |
4,2 |
1,25 |
8,0 |
12,2 |
8 |
3,6 |
4000 |
5,4 |
especificação 3.Electrical do motor deslizante redondo do nema 34 (1,8 graus):
|
Modelo não.
|
Ângulo da etapa
|
Comprimento do motor
|
Atual
/Phase
|
Resistência
/Phase
|
Indutância
/Phase
|
Guardando o torque
|
# das ligações
|
Torque do retém
|
Inércia do rotor
|
Massa
|
|
(°)
|
(L) milímetro
|
|
Ω
|
mH
|
g.cm
|
Não.
|
g.cm
|
g.cm2
|
Quilograma
|
|
JK86HY62-5904
|
1,8
|
62
|
5,9
|
0,23
|
1,5
|
1,8
|
4
|
0,8
|
560
|
1,5
|
|
JK86HY94-4006
|
1,8
|
94
|
4,0
|
0,75
|
4,5
|
2,6
|
6
|
2,4
|
1100
|
2,6
|
|
JK86HY94-5604
|
1,8
|
94
|
5,6
|
0,38
|
3,9
|
3,5
|
4
|
2,4
|
1100
|
2,6
|
|
JK86HY134-6706
|
1,8
|
134
|
6,7
|
0,45
|
2
|
3,6
|
6
|
3,6
|
1800
|
3,6
|
|
JK86HY134-5604
|
1,8
|
134
|
5,6
|
0,63
|
6,6
|
5,0
|
4
|
3,6
|
1800
|
3,6
|
especificação 4.Electrical do motor de piso híbrido de 3 fases (1,2 graus):
| Modelo não. |
Ângulo da etapa |
Comprimento do motor |
Atual
/Phase
|
Resistência
/Phase
|
Indutância
/Phase
|
Guardando o torque |
Inércia do rotor |
Massa |
| (°) |
(L) milímetro |
|
Ω |
mH |
N.m |
g.cm2 |
Quilograma |
| JK86H3P65-3006 |
1,2 |
65 |
3,0 |
0,5 |
1,6 |
2 |
1100 |
1,65 |
| JK86H3P98-5206 |
1,2 |
98 |
5,2 |
0,6 |
3 |
4,5 |
2320 |
2,70 |
| JK86H3P113-5206 |
1,2 |
113 |
5,2 |
0,9 |
5,9 |
6 |
3100 |
3,50 |
| JK86H3P126-6006 |
1,2 |
126 |
6,0 |
0,75 |
2,4 |
6 |
3300 |
3,80 |
| JK86H3P150-5006 |
1,2 |
150 |
5,0 |
1,5 |
3 |
7 |
4650 |
5,10 |
especificação 5.Electrical do motor deslizante de laço fechado do nema 34:
| Modelo não. |
Ângulo da etapa |
Comprimento do motor |
Atual
/Phase
|
Resistência
/Phase
|
Indutância
/Phase
|
Guardando o torque |
# das ligações |
Torque do retém |
Inércia do rotor |
Massa |
| (°) |
(L) milímetro |
|
Ω |
mH |
N.m |
Não. |
Kg.cm |
g.cm2 |
Quilograma |
| JK86HSN45 |
1,8 |
78 |
6 |
0,27 |
2 |
4,6 |
4 |
1,2 |
1400 |
2,3 |
| JK86HSN65 |
1,8 |
100 |
6 |
0,27 |
2,2 |
6,8 |
4 |
1,9 |
2200 |
3 |
| JK86HSN85 |
1,8 |
115 |
6 |
0,36 |
3,8 |
8,5 |
4 |
2,4 |
2700 |
4,3 |
| JK86HSN120 |
1,8 |
155 |
6 |
0,44 |
3,8 |
12 |
4 |
3,6 |
4000 |
5,9 |
especificação 6.Electrical do freio de 86mm 3N.m 6N.m para o motor de etapa:
| Modelo não. |
Ângulo da etapa |
Comprimento do motor |
Atual
/Phase
|
Resistência
/Phase
|
Indutância
/Phase
|
Guardando o torque |
# das ligações |
Torque do retém |
Inércia do rotor |
Massa |
| (°) |
(L) milímetro |
|
Ω |
mH |
N.m |
Não. |
Kg.cm |
g.cm2 |
Quilograma |
| JK86HS68-5904BK6 |
1,8 |
67 |
5,9 |
0,28 |
1,7 |
3,4 |
4 |
0,8 |
1000 |
1,7 |
| JK86HS78-5504BK6 |
1,8 |
78 |
5,5 |
0,46 |
4 |
4,6 |
4 |
1,2 |
1400 |
2,3 |
| JK86HS97-4504BK6 |
1,8 |
97 |
4,5 |
0,66 |
3 |
5,8 |
4 |
1,7 |
2100 |
3,0 |
| JK86HS100-6004BK6 |
1,8 |
100 |
6,0 |
0,36 |
2,8 |
7,0 |
4 |
1,9 |
2200 |
3,1 |
| JK86HS115-4204BK6 |
1,8 |
115 |
4,2 |
1,2 |
14 |
8,7 |
4 |
2,4 |
2700 |
3,8 |
| JK86HS126-6004BK6 |
1,8 |
126 |
6,0 |
0,58 |
6,5 |
6,3 |
4 |
2,9 |
3200 |
4,5 |
| JK86HS155-6004BK6 |
1,8 |
155 |
6,0 |
0,68 |
9,0 |
13 |
4 |
3,6 |
4000 |
5,4 |
especificação 7.Electrical do parafuso linear do nema 34:
| Diâmetro do parafuso (milímetros) |
Ligação do parafuso (milímetros) |
Passo do parafuso (milímetros) |
Curso pela etapa (milímetros) |
Diâmetro do parafuso (milímetros) |
Ligação do parafuso (milímetros) |
Passo do parafuso (milímetros) |
Curso pela etapa (milímetros) |
|
Tr10
|
2 |
2 |
0,01 |
Tr12
|
2 |
2 |
0,01 |
| 3 |
1,5 |
0,015 |
3 |
3 |
0,015 |
| 4 |
2 |
0,02 |
8 |
2 |
0,04 |
| 8 |
2 |
0,04 |
10 |
2 |
0,05 |
| 10 |
2 |
0,05 |
/ |
/ |
/ |
| 12 |
2 |
0,06 |
/ |
/ |
/ |
8. dimensões do motor de etapa do nema 34 de 1,8 graus: (Unit=mm)

9. dimensões híbridas do eixo do motor deslizante: (Unit=mm)
projeto 10.Customized de jogos do motor deslizante do cnc:
tipo do eixo 11.Different:
12.Advantages do motor de etapa 86BYGH
- Baixo custo para o controle conseguido
- Torque alto na partida e em baixas velocidades
- Aspereza
- Simplicidade da construção
- Pode operar-se em um sistema de controlo de laço aberto
- Baixa manutenção
- Menos provável parar ou deslizar
- Trabalhará em todo o ambiente
- Pode ser usado na robótica em uma escala larga.
- Confiança alta
- O ângulo da rotação do motor é proporcional ao pulso de entrada.
- O motor tem o torque completo na paralisação (se os enrolamentos são energizados)
- O posicionamento e a repetibilidade precisos do movimento desde que os bons motores deslizantes têm uma precisão de 3-5% de uma etapa e deste erro são não-cumulativos de uma etapa ao seguinte.
- Resposta excelente a começar/parada/que inverte.
- Muito seguro desde que não há nenhuma escova de contato no motor. Consequentemente, a vida do motor é simplesmente dependente da vida do rolamento.
- A resposta de motores aos pulsos de entrada digital fornece o controle do aberto-laço, fazer o motor mais simples e menos caro para controlar.
- É possível conseguir a rotação síncrono muito de baixa velocidade com uma carga que seja acoplada diretamente ao eixo.
- Uma vasta gama de velocidades rotatórias pode ser realizada porque a velocidade é proporcional à frequência dos pulsos de entrada.
13.Applications dos motores de etapa:
Porque o motor deslizante é digitalmente - controlado usando um pulso de entrada, são apropriados para o uso com sistemas controlados por computador.
São usados no controle numérico das máquina ferramenta.
Usado nos acionadores de cinta, em unidades de discos flexíveis, em impressoras e em relógios elétricos.
O motor deslizante igualmente usa-se no plotador X-Y e na robótica.
Tem a aplicação larga nas indústrias têxteis e nas fabricações do circuito integrado.
As outras aplicações do motor deslizante estão nas naves espaciais lançadas para explorações científicas dos planetas etc.
Estes motores igualmente encontram uma variedade de aplicações comerciais, médicas e militares e igualmente usado na produção de filmes da ficção científica.

 Por favor verifique seu email!
Por favor verifique seu email!